top of page
Neuromorphic Autonomous Drone
Proof of concept for temporal and spatial contrast methods to reduce latency in line-following drone

The Objective
Design a drone restricted to one degree of rotational freedom which autonomously follows a visual stimulus, using neuromorphic methods to reduce response latency.
Designing the Drone
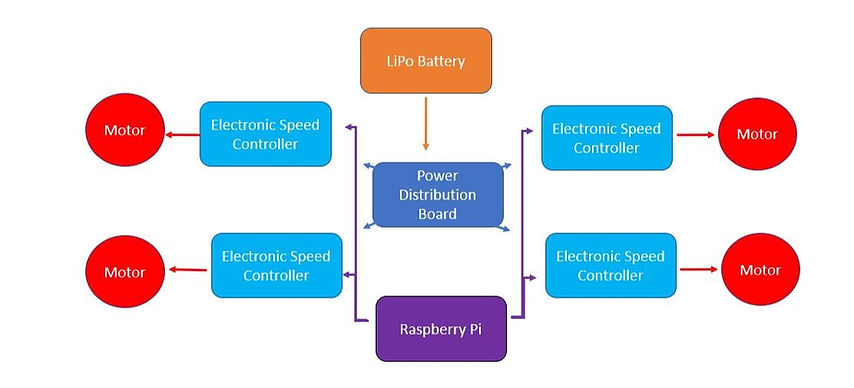

Drone Control
The motors are controlled through PWM functions as an output of a PID loop. The control loop minimizes error - the detected angle of the visual stimulus. When the angle is 0 degrees, then the drone is lined up with the visual stimulus.

Python OpenCV used to detect angle of the visual stimulus for motor control
Testing PID control response of one motor with detected angle (error) from IMU input
Testing PID control of all angles with angle detection algorithm (camera unmounted).
Neuromorphic Methods
We used Python OpenCV to reduce the data, and thus the data processing time, using temporal and spatial contrast algorithms applied to the visual stimulus input.
Temporal contrast (left) and spatial contrast (right) are used to reduce data to minimize latency in angle detection and the PID loop.
bottom of page